Курсовые проекты по КПМ
|
Перечень готовых работ.
|
|
|
1.Расчет механизма грузовой тележки МПТ-4.
|
|
|
2.Расчет механизма передвижения МПТ-6.
|
|
|
3.Расчет механизма подъема груза КДКК-10.
|
|
|
4.Расчет механизма передвижения МПД.
|
|
|
5.Расчет механизма подъема груза крана КДЭ-163.
|
|
|
6.Расчет механизма передвижения ДГКУ-5.
|
|
|
7.Расчет механизма передвижения МПД-2.
|
|
|
8.Расчет механизма подъема груза УК-25.
|
|
|
9.Расчет механизма передвижения УК-25.
|
|
|
10.Расчет механизма подъема груза крана КЖ-461.
|
|
|
11.Расчет механизма передвижения пакетов звеньев МПД.
|
|
|
12.Расчет механизма передвижения пакетов звеньев МПД-2.
|
|
|
13.Расчет механизма подъема груза МПТ-6.
|
|
|
14.Расчет механизма подъема груза ДГКУ-5.
|
|
|
15.Расчет механизма изменения вылета стрелы крана КЖ-461.
|
|
|
16.Расчет механизма подъема стрелы крана КЖ-461.
|
|
|
17.Расчет механизма передвижения грузовой каретки КДКК-10.
|
|
|
18.Расчет механизма подъема груза крана КДЭ -161.
|
|
|
19.Расчет механизма подъема груза КДЭ-163.
|
|
|
20.Расчет механизма подъема груза МПТ-4.
|
|
|
21.Расчет выгребного устройства СЧ-601.
|
|
|
22.Расчет механизма изменения вылета стрелы крана КЖ-562.
|
|
|
23.Расчет тяговой лебедки крана УК 25/9-18.
|
|
|
24.Расчет привода разгрузочного конвейера СМ - 2М.
|
|
|
Цены на готовые работы указаны без чертежа. Стоимость чертежа - 300 руб.
|
|
|
Выдержка из курсового проекта: Расчет грузовой тележки МПТ-4
Введение...2 1. Назначение и общее устройство МПТ – 4...4 2. Устройство и принцип действия механизма передвижения...7 3. Расчет механизма передвижения...10 3.1. Определение сопротивления передвижения тележки...10 3.2. Выбор каната...10 3.3. Определение основных размеров барабана...11 3.4. Определение силы сцепления колес с рельсами...11 3.5. Определение мощности и выбор электродвигателя...12 3.6. Определение передаточного числа и выбор редуктора...13 3.7. Кинематический расчет привода...13 3.8. Определение диаметра вала...14 3.9. Расчет шпоночного соединения...14 3.10. Выбор муфты...15 3.11. Выбор тормоза...15 4. Общие требования при эксплуатации МПТ-4...17 Литература...20 1 Назначение и общее устройство МПТ - 4
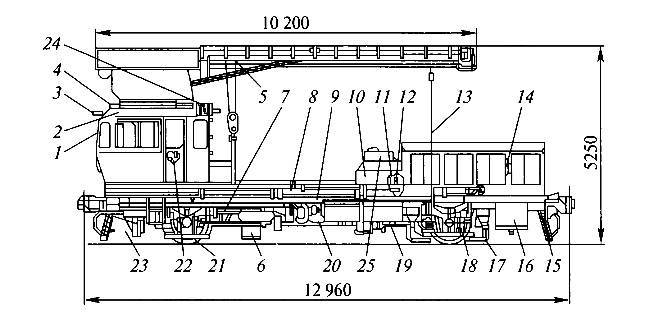
Рисунок -1. Мотовоз погрузочно-транспортный МПТ-4. Общий вид: 1 — стеклоочиститель; 2 — кабина; 3 — тифон; 4 — радиостанция; 5 — крановая установка; 6 — трансформатор сварочный, 7 — тормозная рычажная передача; 8 — борта и подножки; 9 — рама; 10 — капот; 11 — компрессор; 12 — система питания гидропередачи; 13 — транспортные распорки; 14 — огнетушитель; 15 — путеочиститель; 16 — топливные баки; 17— песочницы; 18 — рессорное подвешивание; 19, 20 — карданный вал; 21 — колесные пары; 22 — ручной тормоз; 23 — крепление рельсов; 24 — кондиционер, 25 — электромагнит Погрузочно-транспортный мотовоз МПТ-4 (рис.1) предназначен для погрузочно-разгрузочных работ, перевозки рабочих бригад и грузов при текущем содержании и ремонте железнодорожного пути; используется для маневровых работ на железнодорожных станциях; служит источником питания для различного рода электрических путевых инструментов при выполнении ремонтных работ.
Экипажная часть мотовоза содержит сварную раму 20, которая опирается через буксовое рессорное подвешивание на переднюю 23 и заднюю 77 колесные пары. Привод колесных пар мотовоза осуществляется от дизеля 12 ЯМЗ-238Б-14 мощностью 220 кВт через гидромеханическую коробку перемены передач 19, карданные валы 18, промежуточную опору 21 и осевые редукторы.
Схема привода аналогична приводу полноприводных автомобилей, с той разницей, что здесь отсутствует межосевой дифференциал и, как показывает опыт эксплуатации, ходовая часть при этом испытывает более существенные динамические нагрузки.
Мотовоз имеет тормозную систему 22, автосцепки 13 и систему безопасности движения КЛУБ-УП 14. На раме размещается кабина управления 25, которая позволяет также перевозить персонал в количестве до 11 чел.
Кабина управления 25 имеет жесткий стальной каркас, на котором через промежуточную опору 26 и основание 27 с опорно-поворотным кругом устанавливается консольный кран, имеющий зону обслуживания в радиусе до 7,5 м. Основание крана поворачивается...
2 Устройство и принцип действия механизма передвижения
грузовой тележки
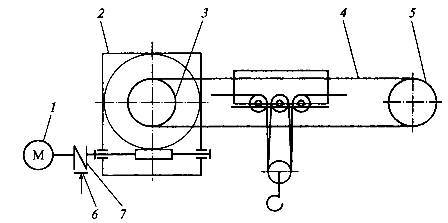
Рисунок - 2. Кинематическая схема передвижения грузовой тележки крана МПТ-4: 1 — электродвигатель; 2 — редуктор; 3 — барабан; 4 — канат тяговый; 5 — блок; 6 — тормоз ТКГ-160; 7— муфта Механизм передвижения грузовой тележки состоит из червячного редуктора 2 (рис. 2) с приводом от электродвигателя 1 через муфту 7, барабана 3, соединенного с редуктором зубчатой муфтой и тягового каната 4.
Тяговый канат 2 (рис. 3) запасован на барабан 1 двумя ветвями. Верхняя ветвь крепится к кронштейну грузовой тележки 3 напрямую (вид Е), а нижняя — через блок 4 на конце стрелы. Передвижение грузовой тележки осуществляется за счет тягового усилия, которое создается или верхней, или нижней ветвью.
При движении тележки от конца стрелы рабочей является верхняя ветвь, а нижняя сматывается с барабана. При движении тележки от начала стрелы происходит обратное, а именно рабочей является нижняя ветвь, верхняя сматывается с барабана.
Изменение направления движения тележки достигается путем реверсирования электродвигателя привода лебедки. Для нормальной работы механизма передвижения тележки необходимо иметь достаточное натяжение каната, регулировка...
Подшипники защищены от пыли и вытекания смазки уплотнительными кольцами, установленными в крышке 8 и корпусе 1. На наружной поверхности барабана нарезаны винтовые канавки для укладки каната. Вал редуктора соединен с валом барабана зубчатой муфтой.
Она состоит из двух полумуфт, закрепленных на концах валов редуктора и тяговой лебедки. Полумуфта на конце вала редуктора представляет собой зубчатую втулку 6, на которую одета зубчатая обойма 7. Зубчатая втулка 6 от осевого перемещения удерживается шайбой 4, привернутой болтами к торцу вала.
К зубчатой обойме 7 со стороны редуктора привернута крышка 5 с уплотнительным кольцом. Вторая полумуфта такой же конструкции установлена на конце вала лебедки. Обе пол у муфты соединены друг с другом болтами.
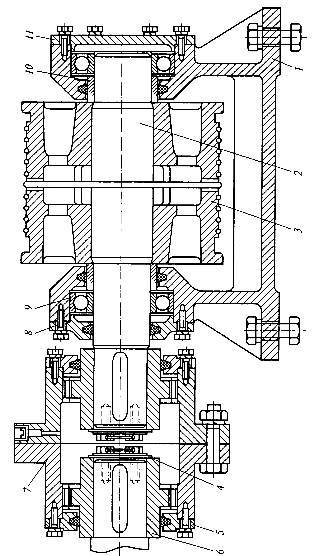
Рисунок – 5. Барабан механизма передвижения
Перемещение грузовой тележки по стреле крана ограничивается концевыми выключателями. При подходе грузовой тележки к крайнему положению на стреле, лыжа, закрепленная на ее раме, нажимает на рычаг концевого выключателя.
Выключатель размыкает цепь питания электродвигателя привода передвижения.
Также на стреле предусмотрены буферные упоры, которые останавливают тележку при отказе в работе концевого выключателя.
3.5 Определение мощности и выбор электродвигателя При установке осей ходовых колес на подшипниках качения, мощность двигателя выбираем из заданного пуска механизма. Предварительно принимаем это время равным 3 сек. Сила инерции Рu , кгс, при этом пуске определяем по формуле:...
3.9 Расчет шпоночного соединения
По таблице П49 подбираем призматическую шпонку размерами b = 8 мм; h = 7 мм.
Расчетная длина шпонки lp = l - b = 45-8 = 37 мм - исполнение А – со скругленными торцами. lp = l - b·0,5 = 45-8·0,5 = 41 мм – исполнение С (с одним плоским и другим скругленным торцом). lp = l = 45 мм – исполнение В (с плоскими торцами).
Проверяем шпонку на смятение. Определим передаваемый момент на валу...
3.10 Выбор соединительных муфт
В рассчитываемом механизме для соединения валов двигателя и редуктора установлена втулочно-пальцевая муфта. Расчет втулочно-пальцевой муфты должен быть произведен по наибольшему пусковому моменту с учетом сил инерции. Муфту выбираем по наибольшему из моментов.
4 Общие требования при эксплуатации МПТ-4
Технический уход сводится к периодическим осмотрам и техническому обслуживанию. Осмотры подразделяют на ежедневный и годовой контрольно-технический.
Ежедневый осмотр водитель выполняет до выезда на перегон. Годовой проводит комиссия. Техническое обслуживание подразделяется на ТО-1, выполняемое через 1250 км пробега (100 ч работы) и ТО-2 — через 5000 км пробега (400 ч работы). Оба обслуживания проводит бригада.
При ежедневном осмотре машину очищают от грязи, проверяют уровень масла и воды в двигателе, исправность сигнализации, кранового оборудования, плотность воздушных и гидравлических трубопроводов. Опробуют исправность двигателя, основных механизмов и
Стоимость курсовой работы на заказ - 1200 руб. |
|
|
1...2
|
|